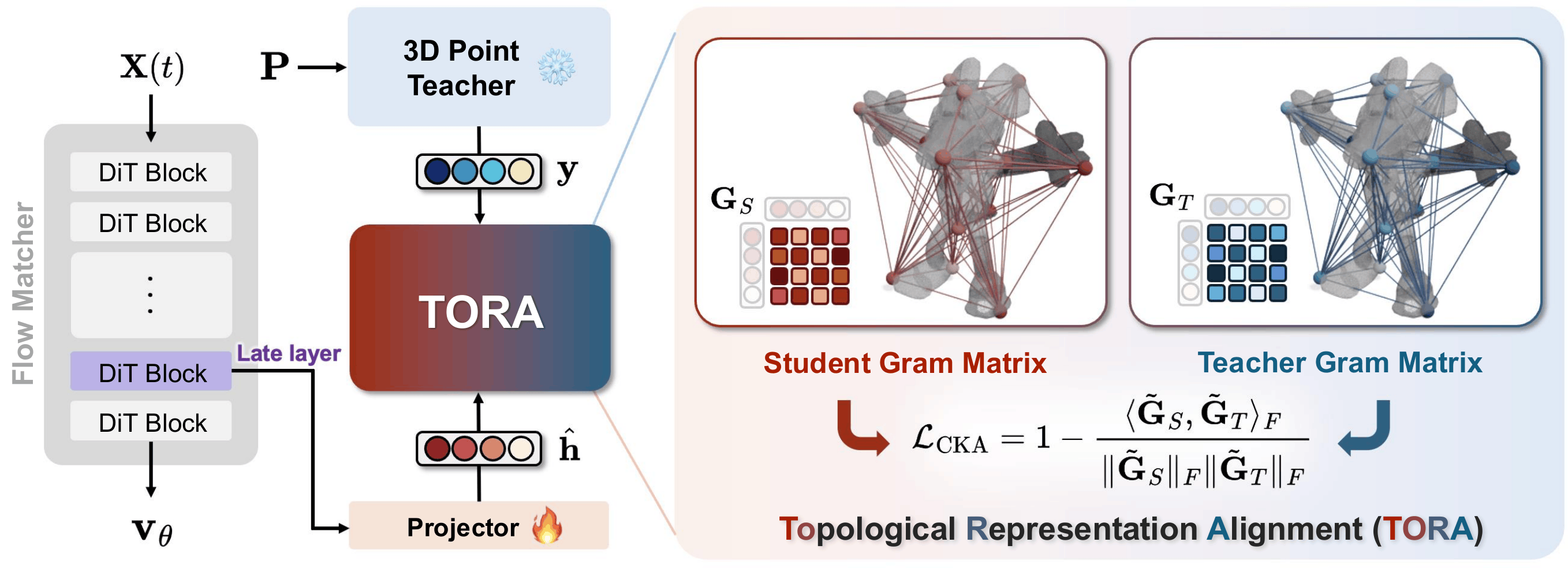
TORA: Topological Representation Alignment for 3D Shape Assembly
TBA
By distilling relational geometric structure from a frozen pretrained 3D encoder into a flow-matching assembly backbone via token-wise cosine and CKA alignment losses, TORA achieves faster convergence (up to 6.9×), improved in-distribution accuracy, and stronger zero-shot transfer across five benchmarks — all with zero additional inference cost.